Competition Robotics Across Four Seasons
Each season had a different game, team structure, and design problem. The first two pages cover V5RC high-school robots; the final two cover the jump into VEX U, where I took on broader system design and team leadership.
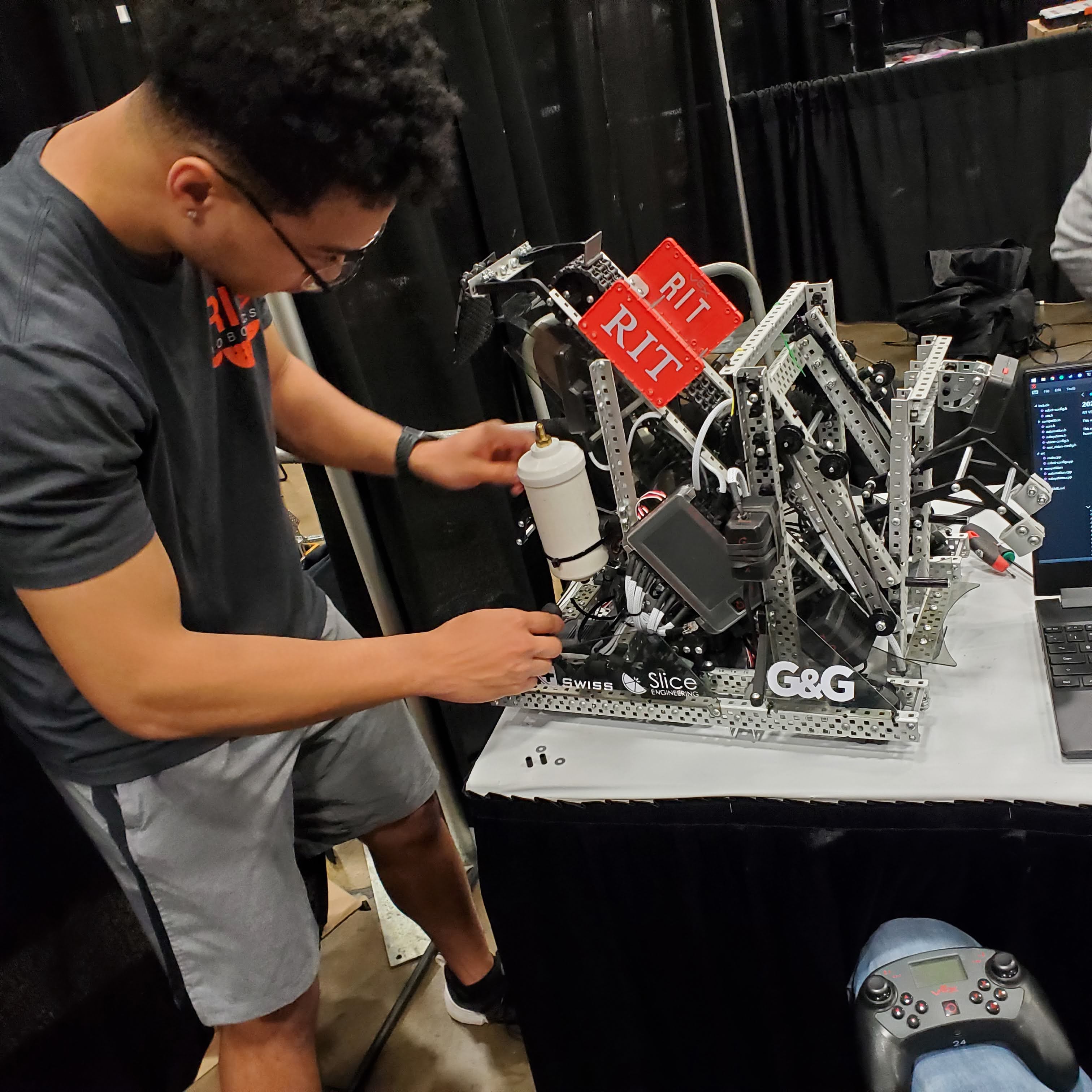
"Tipping Point"
Built a mobile-goal manipulation robot featuring lifting, balancing, and endgame parking mechanisms to maximize scoring opportunities.
Open season ->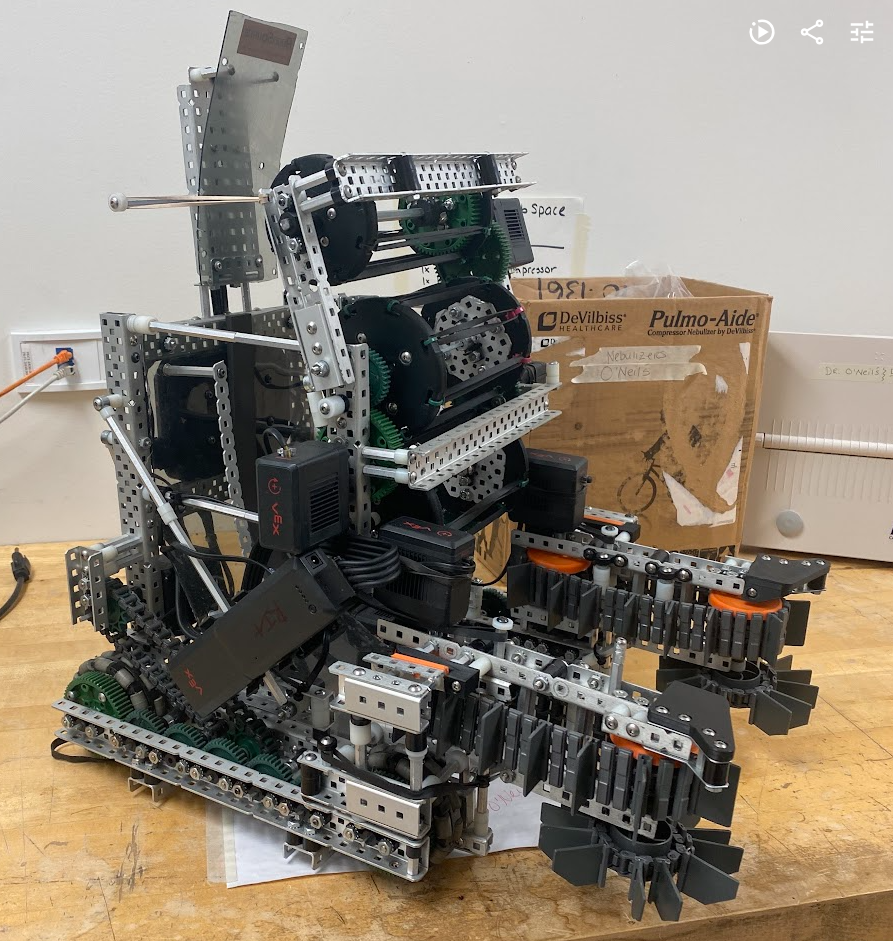
"Change Up"
Engineered a robot to rapidly collect, sort, and score colored balls while adapting to dynamic field conditions and game-state changes.
Open season ->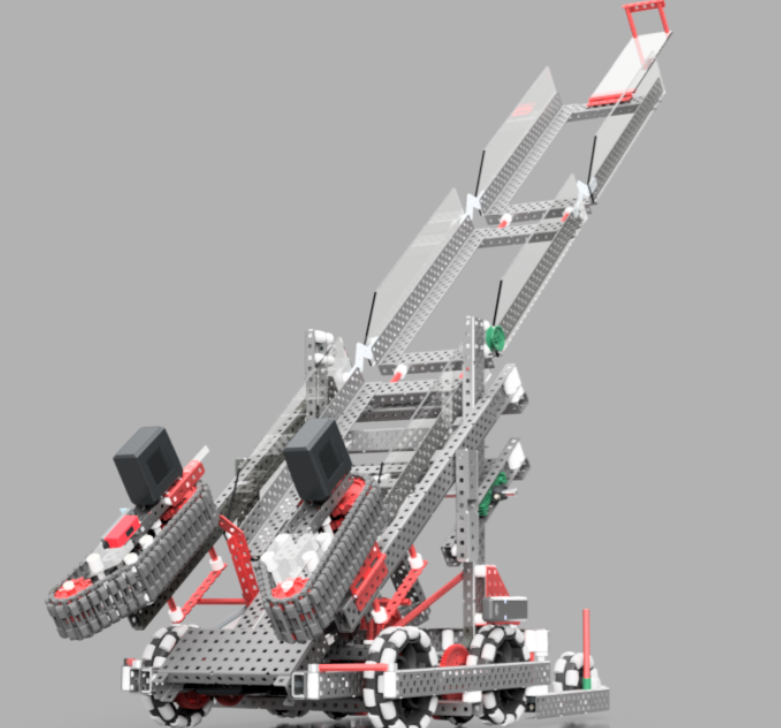
"Tower Takeover"
Developed a high-speed cube intake and stacking system to efficiently score cubes in goals and towers while coordinating alliance strategy.
Open season ->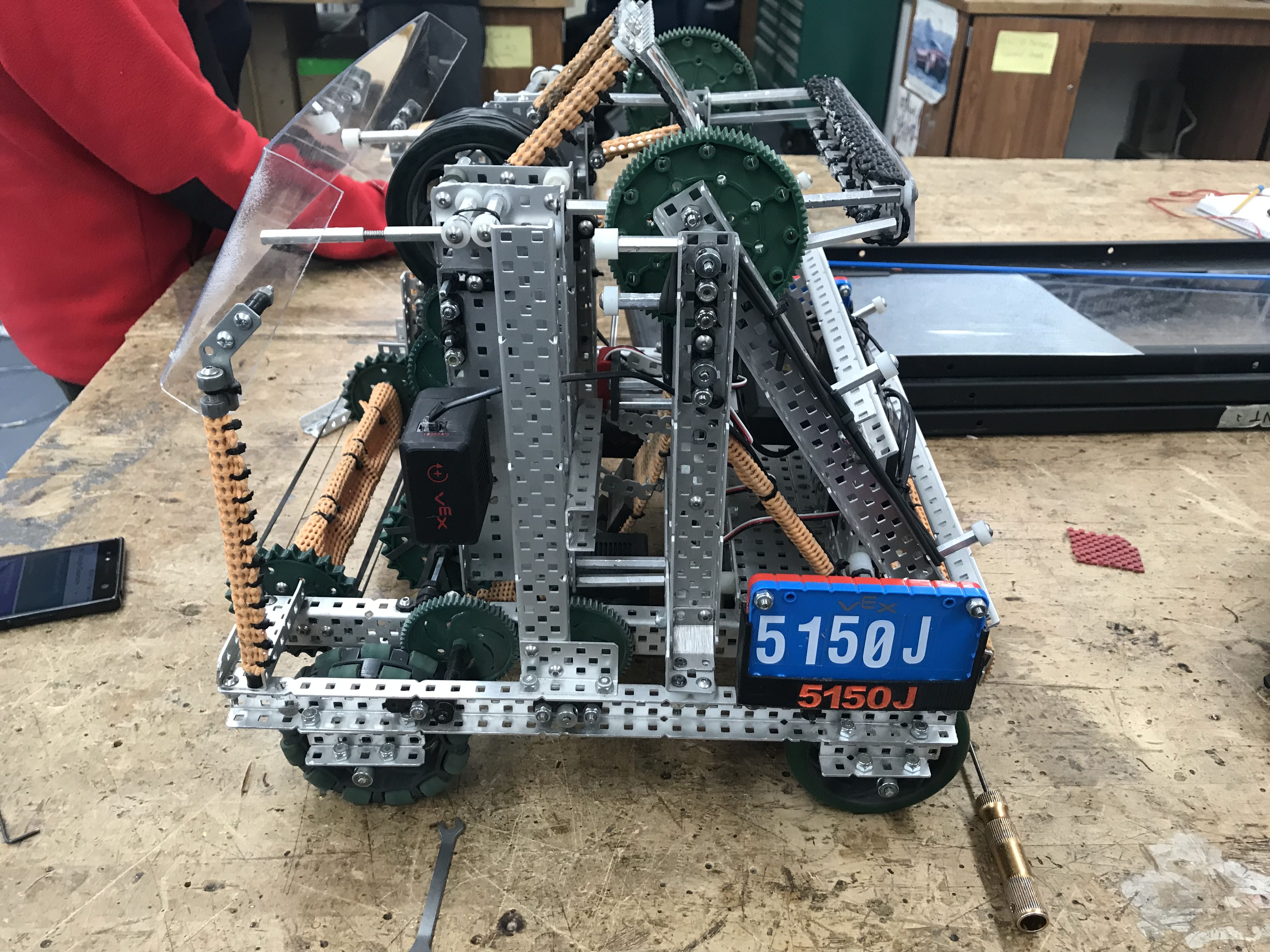
"Turning Point"
Designed and programmed a competitive robot capable of launching balls, manipulating caps, and climbing platforms to score across multiple game objectives.
Open season ->